Automation in manufacturing has made leaps of progress in the last decades, revolutionizing industries across the globe. However, a persistent challenge still remains a headache for multiple industrial sectors – the handling of flexible objects. Nowhere is the challenge more pronounced than in composites manufacturing industry, which involves complex operations, from material handling to assembly operations. The dynamic distortion of flexible materials puts robots’ limitations in the spotlight and conventional approaches lean heavily on manual labor to tackle these intricacies.
On top of this, another pressing concern looms over the composites manufacturing industry – the well-being of its workforce. Workers in the composite industry are often confronted with health issues stemming from chemical exposure and physically demanding tasks.
Are safer and more efficient conditions possible in the Composites Manufacturing Industry?
In contrast to common practice of manual labor, MERGING project introduces innovation in the field of robot cognition and dexterity on the manipulation of flexible objects. With this notion, we introduce a novel multifunctional end-effector for the automation of composite layup. Inspired by the industrial needs for efficient and robust procedures, the meticulous design of the end-effector, allows for consistent and collision-free tools utilization, without excess tool changes.
The multi-purpose end-effector not only aims to (semi-)automate composites manufacturing, by addressing a number of operations related to skin and core material handling, but also strives to provide a safe, risk-free working environment for operators.
Introducing a novel multifunctional robot end-effector, to automate the handling of limp materials and manufacturing of composites
This innovative end-effector aims to address these challenges head-on, with keen focus on improving the working environment and elevating performance metrics within the composites layup process. Having one device covering all processes is bringing us one step closer to unlocking the full potential of robotics in composite layup processes.
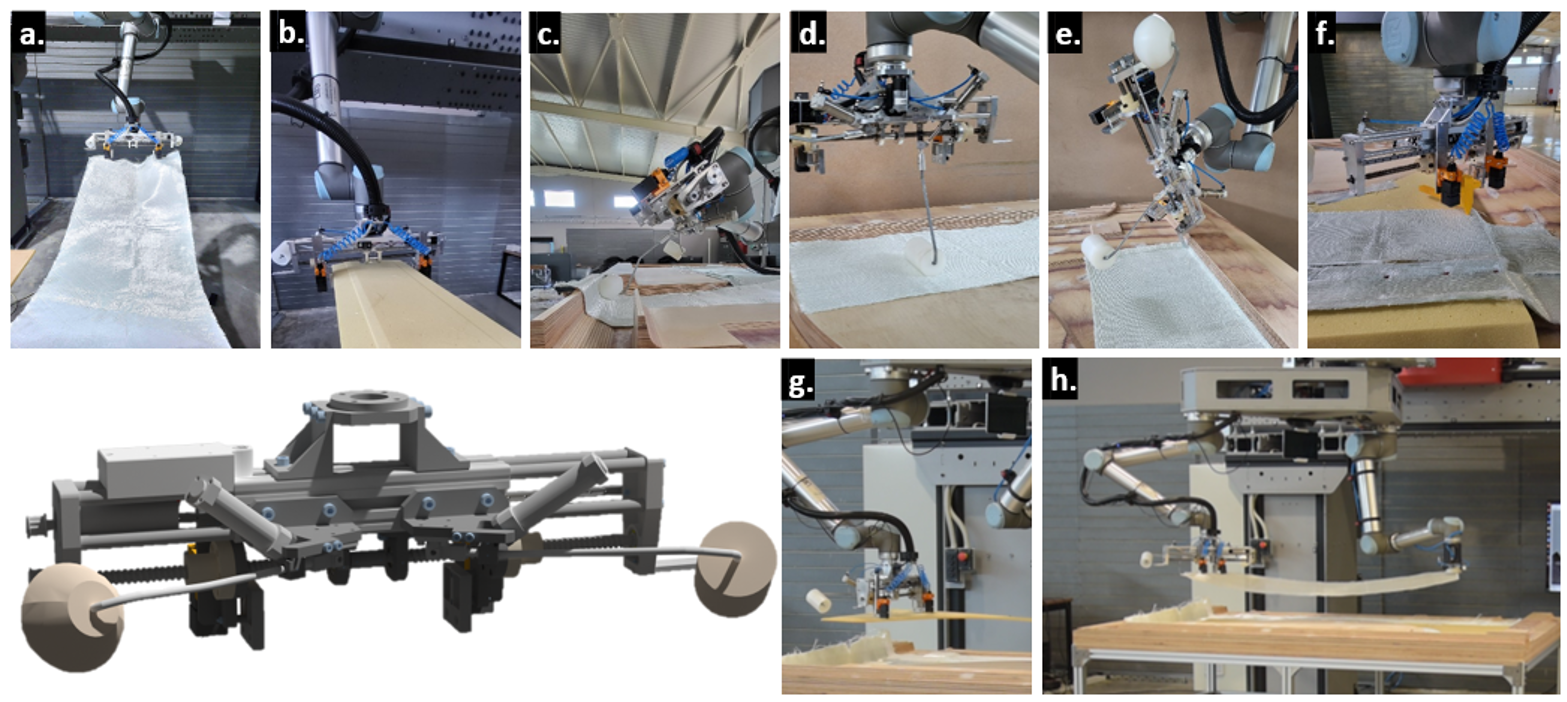
The device couples all major operations of composites manufacturing and layup, in a single cost-effective device:
- Composite fabric grippers: It excels at handling of different variants of fabrics, ensuring precise transport and placement. The distance between the needle grippers, or grasping points, can be laterally adjusted with the use of the leadscrew drive mechanism of the parallel gripper. This adjustment of the grasping point distance is valuable for in-hand manipulation or grasping of composites of different widths.
- Parallel grasping mechanism: It securely grasps core materials, with the use of two holding pads that can mirror like “open” or “close” with the same power input by the intermediate timing-belt powertrain. The pads are designed for achieving friction-based parallel gripping, for core materials, or parallel grasping of tools, such as staple guns, using additional alignment features.
- Layup rollers: A flat-surface and an edge-surface roller (d.) can independently be deployed for evenly distributing resin during the lamination process. A double-acting pneumatic cylinder is responsible for lowering and retracting each tool. By adjusting the air pressure of actuation air, the stiffness of the tool can be fine-tuned.
- Dabber tool: A dabber tool is attached to statically flatten layers in challenging mold geometries, like corner edges
- Grasping of peripheral tools: it can achieve friction-based gripping of peripheral tools like stapling guns or spray gluing guns for performing additional tasks of interest, with the use of the parallel grasping mechanism
The impact of the innovation extends to various industries, including automotive, where it can offer the required dexterity to robot agents, by presenting novel grasping and manipulation skills. Ultimately, this fuels advancements in efficiency, product quality, ergonomics and worker well-being

Papadopoulos Giorgos, Research Engineer, LMS, University of Patras
Giorgos Papadopoulos works as a research engineer at the ‘Robots, Automation and VR in Manufacturing’ group of Laboratory for Manufacturing Systems and Automation (LMS). Holds a Diploma in Mechanical Engineering and Aeronautics from the university of Patras (Greece) and a Master’s degree in Mechanical, Maritime and Materials Engineering department from TU Delft (the Netherlands). His research topics include the design and development of human-robot collaborative solutions, automation applications, cognitive mechatronics and PLC, Robot programming.

Dionisis Andronas, Senior Research Engineer and Project manager, LMS, University of Patras
Dionisis Andronas owns a master’s in mechanical and Aeronautics Engineering from the University of Patras. He is currently employed as a senior research engineer in the Laboratory for Manufacturing systems and Automation (LMS). He has been involved in a number of European Union funded projects, under the H2020 and FP7 programs, both as researcher and project manager. Through the years, he has elaborated on research topics dealing with robotics, human robot collaboration, workstation design, interfaces and design of mechatronics.