The industrial landscape has been rapidly evolving, with robotics playing a pivotal role in shaping modern manufacturing and production processes. However, when it comes to handling flexible materials, the industry faces a unique set of challenges. These materials, due to their dynamic deformation, present complexities that are not encountered with rigid objects. Existing planning algorithms, while effective for basic manipulations of textile materials they present handicaps when it comes to unified rotational and translation movement or the synchronization of diverse agents. This becomes even more evident when one considers the multifaceted process of laying up composite materials.
MERGING’s Response to the Industry’s Need
In the heart of the MERGING project lies our innovative planning framework, designed to address the challenges of collaborative flexible material manipulation. This framework goes beyond traditional methods, offering a comprehensive solution tailored to the complexities of flexible materials. By integrating advanced algorithms and strategies, it redefines the standards of collaboration, and adaptability in the industry.
MERGING introduces a refined planning framework tailored for collaborative flexible material handling.
The MERGING planning framework is designed with a focus on adaptability and realism, aiming to address a range of scenarios from composites to textiles. By abstracting algorithms from specific robot types and geometries, the framework seeks to be applicable across different contexts.
Each module within the framework operates independently, leveraging the modular architecture of ROS. This design choice allows for the dynamic interchange of planning methodologies based on specific scenarios. Integration with our deformable object model is facilitated through ROS interfaces.
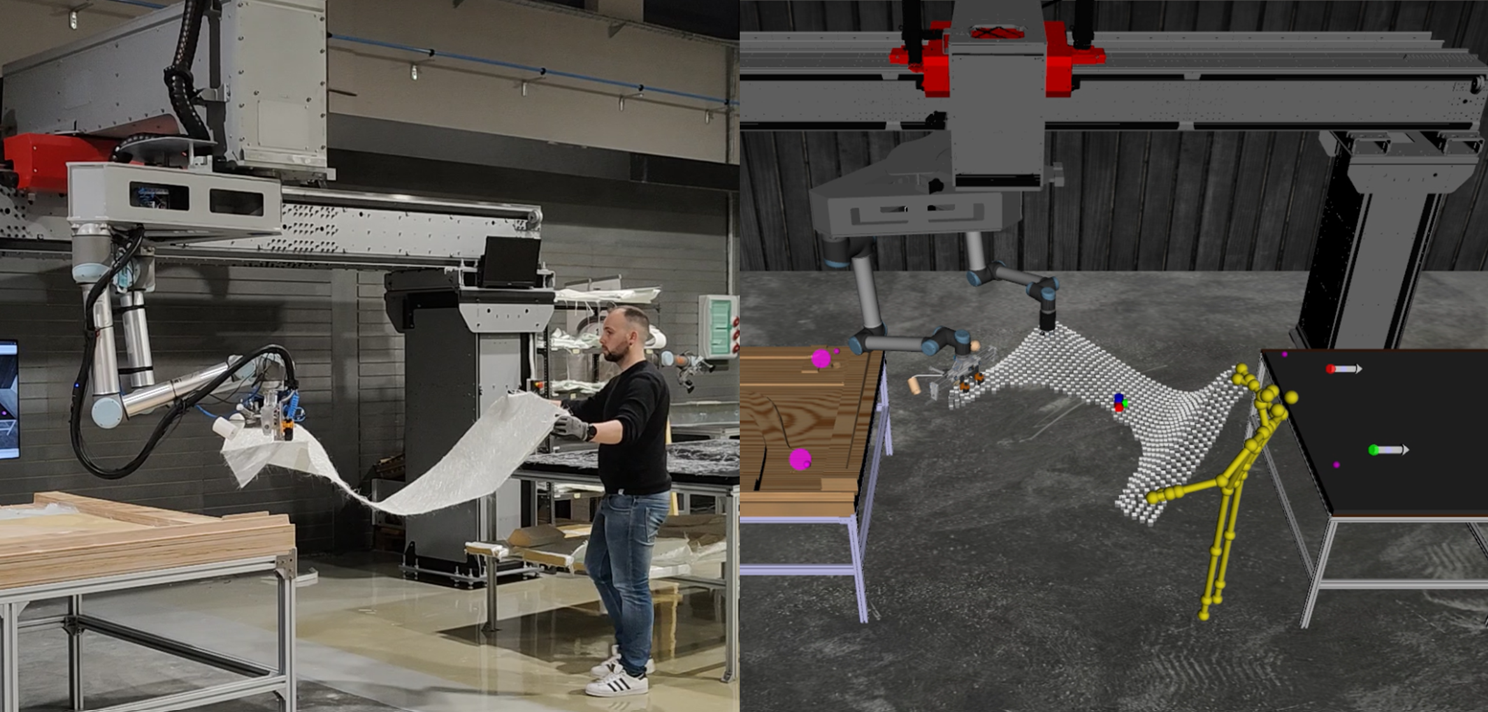
During the initialization phase, robots position themselves relative to the fabric. This involves a series of sub-processes tailored to accommodate various robotic configurations, setting the stage for the subsequent collaborative manipulation phase.
The planning algorithm takes into account both the robotic arms and additional planning axes. These axes, essential for reach and positioning, are integrated into the planning process to ensure coordinated movements, especially when dual-arm configurations are involved.
In the co-manipulation phase, the planning algorithms incorporate geometric constraints to facilitate coordinated movements between two manipulators, the rail, and the torso axes. In parallel, the system translates inputs into corresponding robot actions, ensuring that the robots operate in harmony with the human operator’s intentions. Safety precautions are embedded within the framework, and operator-supporting interfaces are integrated to provide a consistent interaction experience. The resulted supportive robot arm trajectories are the result of an optimization process that is characterized by its reconfigurability and computational efficiency.
Movement planning within the framework addresses both translational and rotational movements. A hybrid movement mode combines these two types of movements, offering a more comprehensive approach to fabric handling. The framework also considers additional planning axes, such as linear and rotational, during the planning process.
The final stages of the process, placement, and layup, are crucial. The framework ensures that the fabric is not only manipulated but also accurately placed and laid out on the desired surface or mold. This involves a series of precise movements and adjustments to ensure the material aligns correctly with the target area.
In summary, the MERGING planning framework provides a structured approach to the collaborative manipulation of flexible materials, from initial positioning to final layup.
MERGING’s planning framework offers a solution to the industry’s challenges with flexible materials. Through our innovative approach, we aim to enhance collaborative manipulation, ensuring both precision and adaptability in real-world applications.

Emmanouil Kampourakis, Research Engineer, LMS, University of Patras.
Emmanouil Kampourakis works as a research engineer at the “Robotics” group of Laboratory for Manufacturing Systems and Automation (LMS). Bringing with him a solid foundation in software engineering, simulation models, control algorithms, embedded systems, and electronics, Emmanouil continually seeks to push the boundaries of knowledge in these fields. His research activities include the design of digital twins and simulation environments, cutting-edge algorithms for collaborative robotic cells and a plethora of interfaces utilizing state-of-the-art sensors and actuators.