In today’s rapidly evolving industrial landscape, digitalization has emerged as a driving force behind the transformation of factories worldwide. Industries are increasingly harnessing the power of simulations and digital twins to revolutionize their manufacturing processes. One area of particular interest is the adoption of simulations and digital twins to drive digitalization efforts in industries dealing with flexible materials. This strategic shift towards digital technologies holds immense potential to optimize production, improve operational efficiency, and drive innovation in the realm of flexible material industries.
However, the intricate nature of the physical and mechanical characteristics of flexible materials presents a significant challenge when simulating and capturing their real-time behavior. The complexity arises from the fact that the deformation of an object is influenced not only by the external forces exerted upon it but also by its composition. Most of the time, the physical properties of these materials cannot be retrieved by already existing databases, especially when composite materials are concerned.
As a result, the full potential of planning and reasoning algorithms that rely on modeling techniques cannot be realized unless the object’s deformation is accurately represented. The calibration and fine-tuning of these models pose a significant challenge to industries dealing with pliable materials, hindering their advance towards automation and the Industrial metaverse.
How do you bridge the gap between the real world and the simulated environment?
LMS has developed a novel methodology to seamlessly connect a deformable object’s digital representation with its physical counterpart. By deploying advanced optimization algorithms and artificial intelligence (AI) the proposed approach promises to enhance the accuracy and effectiveness of simulations in modeling and analyzing complex cyber-physical systems.
MERGING introduces a systematic procedure for the automated optimization of modeling parameters, combining accuracy and ease of integration for flexible materials.
Upon examination of the parameter optimization problem, it becomes apparent that two fundamental questions need to be answered:
- How can we acquire a precise evaluation of the resemblance between the physical object and its model representation?
- How can an efficient and effective approach be developed to navigate the extensive parameter space and discover optimal configurations for the non-linear and anisotropic equations that describe the deformable object’s behavior?
In our approach, to address these fundamental questions, the following strategies were adopted:
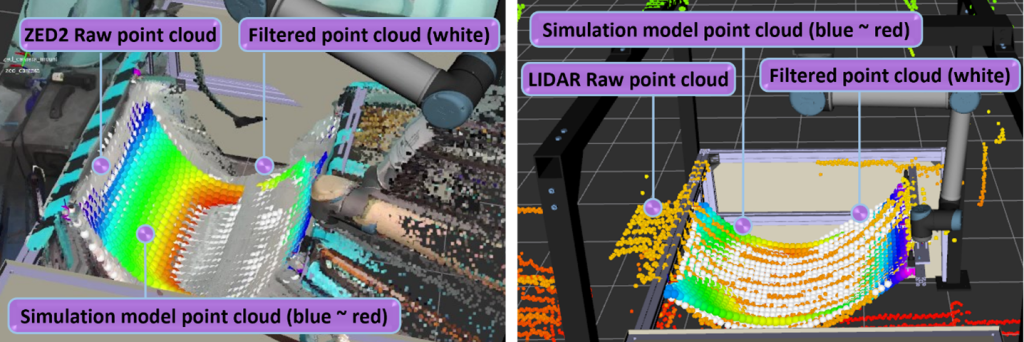
First and foremost, we need to gather data from reliable and credible sensors, ensuring accurate measurements of the object’s characteristics. This raw data is then processed and filtered to make it comparable with the reconstructed model. To facilitate comparison, the point-cloud structure proves to be highly advantageous. Employing point cloud comparison techniques, such as the chamfer distance metric, allows us to quantify the similarity between two point clouds and generate a “similarity score”.
To iterate through the vast amount of possible configurations for the model we need an efficient and reliable optimization module. Here, we present two distinct options within the module. The first option is Bayesian optimization, a renowned algorithm for globally optimizing black-box functions. Leveraging probabilistic modeling and intelligent exploration-exploitation trade-offs, Bayesian optimization facilitates efficient searching for the best solution amidst the parameter space. The second option is the CMA-ES algorithm, which introduces a novel approach to numerical optimization, harnessing the benefits of genetic algorithms. These two optimization options, integrated into the framework, provide flexible and powerful means to seek optimal configurations, significantly enhancing performance and efficacy in the parameter optimization process.
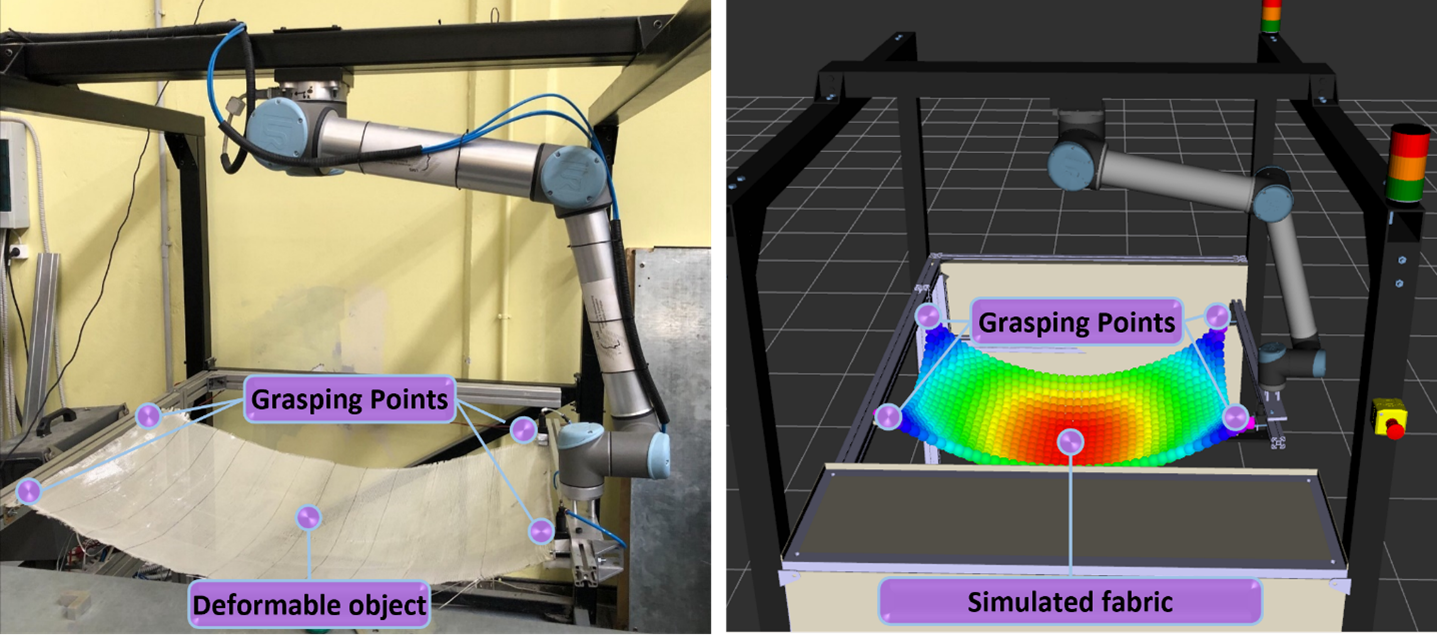
The experimental verification of the methodology’s results has been conducted by applying it to the reconstruction model of two-dimensional deformable objects, which was analyzed in a previous blog post. By capturing data from two distinct perception systems, an RGB-D sensor (ZED2 camera) and a laser-based sensor (LiDAR Velodyne puck), and deploying two optimization algorithms the methodology’s flexibility has been showcased.
The model’s parameter optimization has taken Merging’s digital twin to the next level. Promising to enhance and broaden the reach of robotic automation in non-rigid assemblies by providing reliable digital twins, the proposed methodology can become a valuable tool in cyber-physical systems and the industrial metaverse.
For more information you can refer to our publication:

Nikolaos Theodoropoulos, Research Engineer, LMS, University of Patras.
Nikolaos Theodoropoulos works as a research engineer in the field of Robotics and Automation at the Laboratory for Manufacturing Systems and Automation (LMS). He holds a degree in Electrical and Computer Engineering from the University of Patras, where he established a solid foundation in computer science and electrical engineering. He has a background in software engineering, low-level programming, computer architecture, embedded systems design, and communication protocols. With a passion for technological advancements, Nikolaos’ research activities involve the development of control algorithms and hardware interfaces for robotic cells, the design and optimization of digital twins, and the development of computer vision algorithms for robotic applications.