Presentation of the basic functionalities for creating and editing diagrams.
05Oct/23
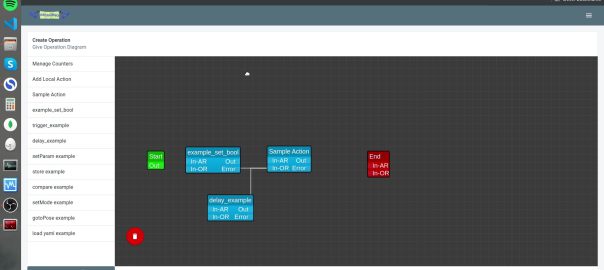
Presentation of the basic functionalities for creating and editing diagrams.
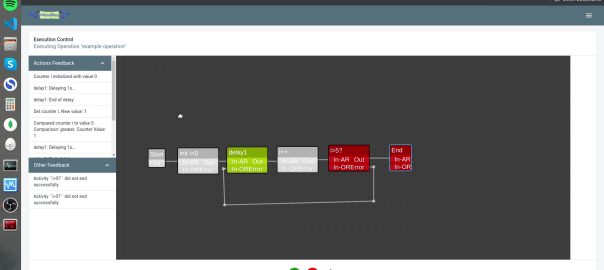
Instructions for using “Add Local Actions” and “Manage Counters” elements and creating loops.
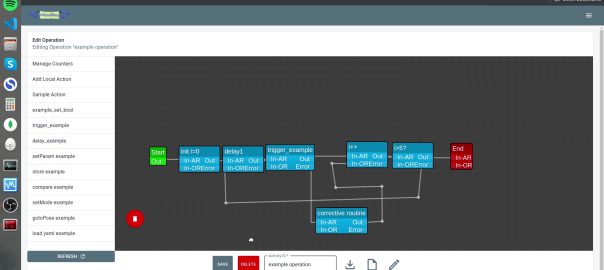
Insights on common error handling practices. How to import and export activities to create backups or exchange them among different instances is also discussed.
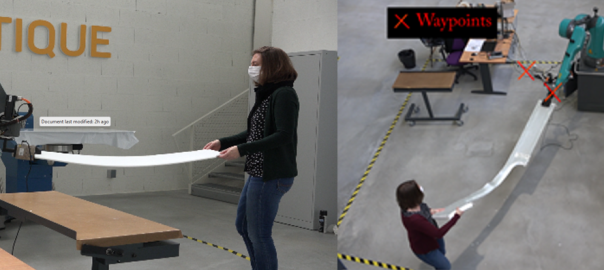
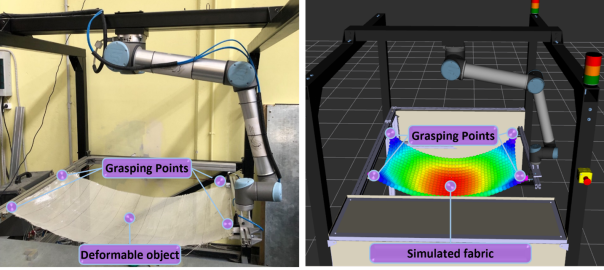
Large and fragile object manipulation tasks are extensively performed by operators in industrial contexts, for instance in aerospace industry as well as in construction field. Our work in the project has beenRead More…

Historically, robotic arms have been applied mainly to large scale processes and production lines, with many smaller scale activities remaining largely based on manual work. The resulting robotic cells are generally fullyRead More…

PRESS RELEASE 13 September 2023 The technological outcomes of MERGING have started to demonstrate their potential. Research partners, supported by the project’s integrators, have collaborated on delivering the project’s integrated robotic systems.Read More…
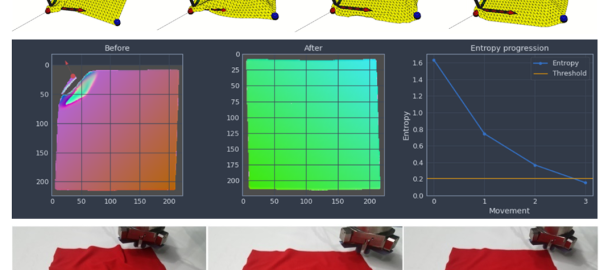
The challenge of manipulating complex materials involves the identification of measurable quantities that offer insights into the system, which can then be utilized to make informed decisions and take appropriate actions. ThisRead More…
PRESS RELEASE December 2021 Robots have transformed many areas of manufacturing, to the point that whole industries –from automotive to electronics and chemical – would now be unthinkable without them. But otherRead More…
In today’s rapidly evolving industrial landscape, digitalization has emerged as a driving force behind the transformation of factories worldwide. Industries are increasingly harnessing the power of simulations and digital twins to revolutionizeRead More…
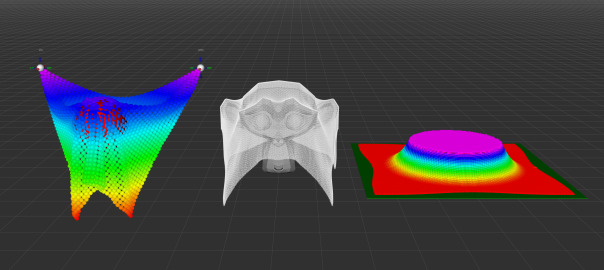
The realm of robotics and simulation has witnessed a rapid evolution in recent years, marked by breakthroughs in areas like artificial intelligence, machine learning, and advanced material modelling. Still, handling and manipulatingRead More…