26Oct/23
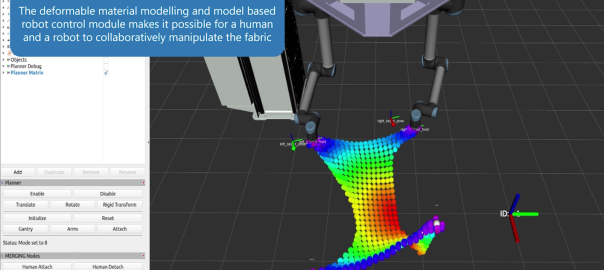
Deformable material modeling and model-based robot control video tutorial
A concise and methodical walkthrough of the main functionalities provided by deformable material modelling and model-based robot control module
A concise and methodical walkthrough of the main functionalities provided by deformable material modelling and model-based robot control module