05Oct/23

DOHC Manual
A Deformable Object Handling Controller manual in pdf format.
A Deformable Object Handling Controller manual in pdf format.
This instructional video provides a concise and methodical walkthrough of the entire installation process to ensure a seamless setup of the DOHC software on your system
An overview of DOHC, delineating its key functionalities, primary applications and how it can facilitate the precise management of deformable objects within an industrial framework
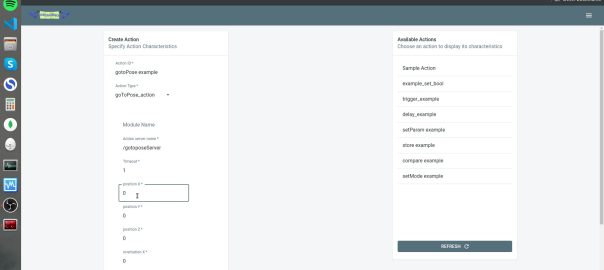
Learn the basic functionalities offered by actions and how to use the action creation interface.
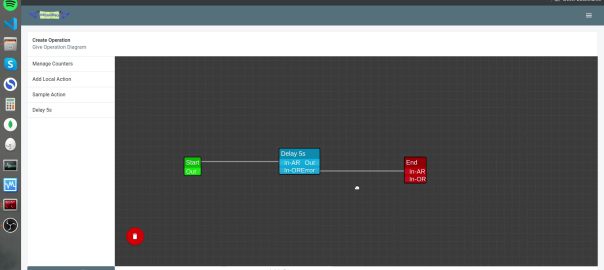
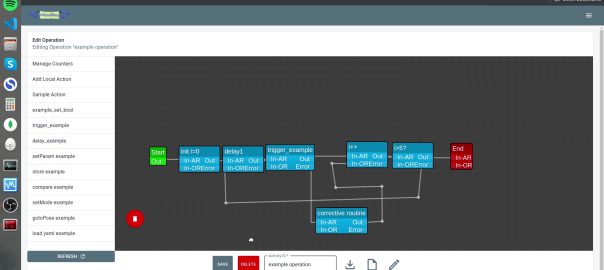
Presentation of the basic functionalities for creating and editing diagrams.
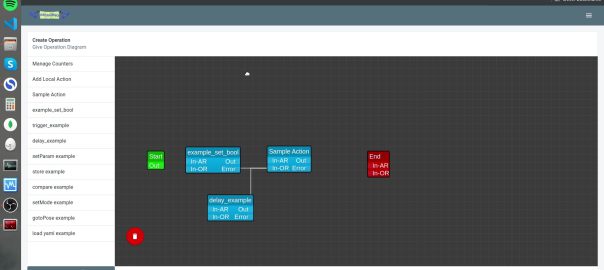
Instructions for using “Add Local Actions” and “Manage Counters” elements and creating loops.
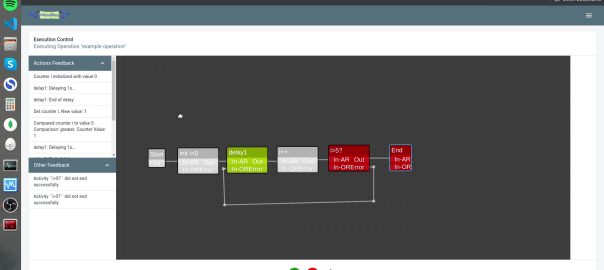
Insights on common error handling practices. How to import and export activities to create backups or exchange them among different instances is also discussed.